AVE-2までの道のり
AVE2-X(2002
年12月〜2003年2月)
AVE-1での出場後、これでは高速走行時の安定性を得るのは難しいことがわかりました。
そこで、上面センス型センサを前後に2つつけた「AVE2-X」を作りました。

写真が残っていないので、図で説明します。図右側が「AVE2−X」です。
最近だと名古屋工学院専門学校のマウスがこのタイプです。
これの良いところは、姿勢制御が確実にできる、という点です。
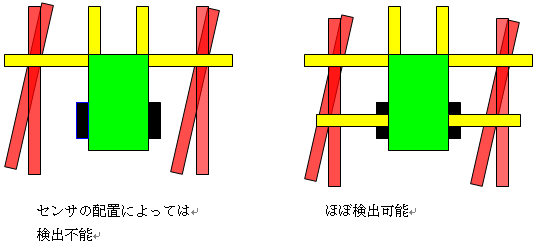
この図をみると一目瞭然かと思います。単なる両面センス型だと、センサの取り付け幅によっては
迷路に対する機体の角度が正確に検出できない場合があります。
しかし、AVE2-Xでは、後ろのセンサを併用することによって、車体角度を検出することができます。
問題点もあります。これは上面センス型に共通する問題点なのですが、旋回時に旋回中心からずいぶん
離れたところに重量がある(センサ出っ張りの分)ということです。
センサが重いと、高速走行からスラロームに入るとき、大きく姿勢を崩す恐れがあります。
AVE2
-X2・3・4(2003年2月〜8月)
AVE2-Xは、エキスパートを戦うのに十分なマウスでしたが、センサが常時点灯していたため消費電力が
大きいという問題点がありました。その大きさはかなりのもので、3端子レギュレータ1個ではまかないきれない
ことがあるほどです。(したがって2つ載せていました。)
パルス駆動にしても良かったのですが、センサが24個も付いている(前6つずつ、後ろ4つずつ)という点で、
消費電力の大きさを覆い隠すことはできないと考えました。
その他、AVE2-Xでは、AVE−1と違ってスラロームや斜め走行を行ないたい、とも考えました。
さらに、AVE-1より速く走りたいと当然ながら思いました。
この段階であがった要求仕様は以下の通りです。
・上面センス型センサを止める。
(重量にもよるが、ターンのときに重心がぶれる原因になりやすい。)
・去年とは別のホイールを使う。
(去年のホイールは、モータへの取り付け側にねじ止め部分があって、この分だけ車幅が増えていた。)
・より多くの電池を積む。
これらの要求仕様を満たすものとなると、やはりBASICMOUSEタ
イプが良いのではないか、と考えました。
そこで、BASICMOUSEを元に
・可視光センサを使用。(ほとんど同じ回路のものを使用)
・同じタイヤ・ホイールを使用。(エフテックのタイヤと滑り止めシート)
・電池は単四16本に。(単四16本と単三12本は、パックすると似たようなサイズになる)
といったスペックの「AVE2-X2」「AVE2-X3」「AVE2-X4」をつくりました。ところが・・・
AVE2−X2・・・センサ若干不安定。激突時に接触不良が発生し、使用不可。

AVE2−X3・・・センサが安定せず頓挫。
AVE2−X4・・・センサは安定させたが、モータドライブがおかしくなり全パーツが故障。

という状況で、8月ごろまでまともに完走できるマウスが完成しませんでした。
さらに、多数のLCDを壊しました・・・。

すべて全滅です。
これには以上のような原因がありました。
・マイコン未使用ポートの処理がまずい。
・基板を積み重ねた際の接触不良。
・ユニバーサル基板を使ったときの種々の問題。
これらの問題を解決したのが、AVE-2です。