(といってもたかだか1年ちょっと前ですが。)
秋月製、「ステッピングモータ駆動キット」(だったっけ?)についている
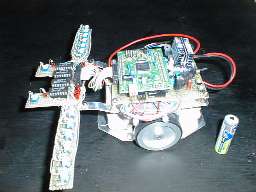
ステッピングモータ×2で作った機体です。
直進と、壁を見つけたら停止、右か左かに一度だけ旋回することしか
できない機体でした。
フレームはアルミですが、あまりにもお粗末な工作精度
(中学生の方がまだうまいくらいです)だったため、当然まっすぐ走れませんでした。
また、接触不良が頻発しました。(コネクタの設計がまずかったからでしょう。)
タイヤは「タミヤ楽しい工作シリーズ」のナロータイヤをつかってます。
それから、前輪として同じく
タミヤ楽しい工作シリーズの、ボールキャスタが入っています。