AVE
-1丒僜僼僩僂僃傾偺旈枾
扵嶕帪偺彫嵶岺
偝偰丄扵嶕偺偲偙傠偱彮偟怗傟傑偟偨偑丄
乽2昩埲忋儅僂僗偑惷巭偟偨傜丄憱峴傪拞巭偟偨傕偺偲傒側偡乿偲偄偆婯掕偑丄偙偺戝夛偐傜摫擖偝傟傑偟偨丅
偙偺婯掕偵堷偭偐偐傜側偄傛偆偵偡傞偨傔偵偼丄
摉慠丄乽憱峴偟側偑傜扵嶕曽岦傪峫偊傞乿偙偲偑昁梫偵側傝傑偡丅
摿偵丄崱夞巊偭偰偄傞懌棫朄偼丄摍崅慄偺寁嶼偑寢峔廳偨偄偱偡偐傜丄偙偺偙偲偼偐側傝廳梫偱偡丅
偟偐偟丄憱峴偟側偑傜峫偊傞偲丄巔惃惂屼偑慳偐偵側傞偲偄偆婋尟偑晅偒傑偲偄傑偡丅
偙傟偵娭偟偰偼丄俠俹倀傪憗偔偟偰寁嶼偟偰偄傞帪娫傪彮側偔偡傞偐丄寁嶼儌僕儏乕儖傪嵟揔壔偟偰丄
彮偟偱傕憗偔偡傞偐偟偐偁傝傑偣傫丅
俫俉/3048俥傪巊偭偰偄傞曽偱偁傟偽丄3052俥偵曄峏偡傞丄偲偄偆夝寛曽朄傪偍姪傔偟傑偡丅乮偮傑傝俠俹倀傪憗偔偡傞乯
偨偩偟偙偺曽朄偼丄偦傟側傝偵儅僀僐儞偺抦幆偑偁傞曽偵尷傝傑偡丅
3048俥偲3052俥偼丄摨偠僶僀僫儕傪棟夝偱偒傞偺偱丄曄峏側偟偱傕摦偄偰偔傟傑偡丅
偟偐偟丄儊僀儞僋儘僢僋偑16MHz偐傜25MHz偵忋偑偭偰偄傞搒崌忋丄帪娫偵娭學偡傞晹暘偼
偡傋偰彂偒偐偊傞昁梫偑偁傝傑偡丅乮摉慠丄僞僀儅乕廃傝偼堦愗崌嵿彂偒側偍偡偙偲偵側傞丒丒丒偲巚偄傑偡丅乯
傛偭偰丄偪傚偭偲晘嫃偑崅偄偱偡丒丒丒丅
巹偼椉幰偺堘偄偼丄戝懱棟夝偟偰偄偨偺偱偙偺曽朄傪偲傞偮傕傝偱偟偨丅
偟偐偟丄3048俥梡偵僨僶僢僌儃乕僪傪奐敪偟偰偄偰丄偙傟偑偦偺傑傑3052俥偵巊偊側偄乮偪傚偭偲庤傪擖傟傞昁梫偁傝乯
帠偑傢偐偭偨偺偱丄偙偺忔傝姺偊偼傗傔傑偟偨丅
寢嬊儌僕儏乕儖偺嵟揔壔傪峴偆偙偲偵偟傑偟偨丅
乮嵟揔壔偲偄偭偰傕丄戝偟偨偙偲偼偁傝傑偣傫丅儖乕僾暥傪嶍偭偨傝丄娭悢屇傃弌偟傪嬌椡巭傔偨傝
偲偄偭偨帠傪偟偨偩偗偱偡丅摉慠丄偙傟傪傗傞偲僐乕僪偑撉傒偵偔偔側傝傑偡丅乯
偝偰丄偙偙傑偱嶌偭偨偲偙傠偱廳戝側栤戣偵傇偪摉偨傝傑偟偨丅
偦傟偼丄乽摍崅慄傪堷偔偨傔偵偼丄尰嵼偄傞嬫夋偺暻忣曬傪惓妋偐偮姰慡偵庢傞昁梫偑偁傞乿
偲偄偆偙偲偱偡丅
偙偙偱丄俙倁俤亅侾偺宍忬傪尒偰傒傑偟傚偆丅
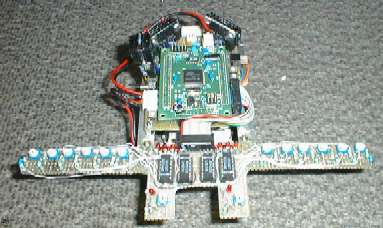
慜暻傪庢傞丄僙儞僒偺挿偝傪尒偰偔偩偝偄丅
偙偺幨恀偩偲暘偐傝偵偔偄偐傕偟傟傑偣傫偑丄幚偼3僙儞僠偪傚偭偲偟偐偁傝傑偣傫丅
偦偺3僙儞僠偺愭偵丄1偮偢偮丄崌寁俀偮偺僙儞僒偑壓岦偒偵偮偄偰偄傑偡丅
偙偺僙儞僒偱帺暘偺恑峴曽岦偺暻傪尒偮偗傛偆偲偡傞偲丄乽偦偺嬫夋偵姰慡偵擖傝偒傞昁梫偑偁傞乿
昁梫偑偁傝傑偡丅
偲偙傠偱愭傎偳丄摍崅慄偺寁嶼傪嵟揔壔偟偨偲彂偒傑偟偨偑丄偨偲偊嵟揔壔偟偨偲偟偰傕丄
寁嶼偟偰偄傞娫偵丄3丒4僙儞僠埲忋偼恑傫偱偟傑偆埵丄廳偄寁嶼偱偡丅
丒丒丒偲偄偆偙偲偼丒丒丒丅
暻傪尒偮偗偨仺寁嶼拞仺丒丒丒偦偺娫偵4僙儞僠埲忋恑傫偱偟傑偆丒丒丒
偁傟丒丒丒丠
偁丒丒丒
乽寁嶼拞偵暻偵撍偭崬傫偠傖偭偨両両乿
丒丒丒偲偄偆帠懺偑敪惗偟偰偟傑偆傢偗偱偡丅
偙傝傖丄懯栚偩丅偳偆偟傛偆丒丒丒丅偙偙偱3偮偺夝寛嶔傪峫偊傑偟偨丅
侾丏扵嶕帪偺恑峴懍搙傪棊偲偡丅
俀丏僙儞僒傪傕偭偲慜偵偮偗傞丅
俁丏巚偄愗偭偰巭傑偭偰峫偊傞丅
侾丄傕偟偔偼俁偼丄尰幚揑側夝寛偱丄埆偔側偄偱偡丅
偱偡偑丄夁嫀偵帪娫愗傟偱僑乕儖偑岞幃婰榐偵側傜側偐偭偨宱尡偐傜尵偆偲丄
彮偟偱傕憗偔扵嶕傪嵪傑偣偨偄偺偑恖忣乮丠乯偱偟傚偆丅
俀傕帋偟偰傒傑偟偨偑丄
僙儞僒偺埵抲偑曄傢傞偙偲偵傛偭偰丄戝暆側僐乕僪偺尒捈偟偑昁梫偵側傝傑偡偟丄
崅懍憱峴帪丄幵懱偺埨掕搙偑偐側傝棊偪偰偟傑偆丄偲偄偆寚揰偑偁偭偨偺偱丄
乮偐側傝椙偄曽朄偩偭偨偺偱偡偑乯媝壓偟傑偟偨丅
乮庢傝晅偗曽偑傑偢偐偭偨偩偗偐傕偟傟傑偣傫偑丒丒丒丅乯
側傫偲偐懠偵椙偄曽朄偼側偄偐丒丒丒偲峫偊偰偄傞偲丅
偐側傝攏幁攏幁偟偄乮丠乯曽朄傪峫偊晅偔偵偄偨傝傑偟偨丅
丒庢傟側偄忣曬偼丄慜暻偩偗偩丅慜暻埲奜偼惓妋側忣曬傪丄嬫夋偵姰慡偵擖傝愗傞慜偵摼傞偙偲偑偱偒傞丅
丒慜暻偩偗暘偐傜側偄偲偟偨傜丄憐掕偱偒傞僨乕僞偼丄乽慜暻偁傝偺嬫夋乿偲乽慜暻側偟偺嬫夋乿偺2偮偩偗偩丅
丒嬫夋偵儅僂僗偺僙儞僒晹暘偑擖偭偰偐傜丄幵懱偑姰慡偵嬫夋偵擖傞傑偱偼丄10僙儞僠埲忋偁傞丅
偲偄偆偙偲偼丄寢峔帪娫偑偁傞偙偲偵側傞丅
埲忋偺峫嶡偐傜丄
乽慜暻偑偁傞応崌偲丄慜暻偑側偄応崌丄2捠傝偵偮偄偰偁傜偐偠傔峫偊偰偍偗偽椙偄乿
偲偄偆丄寢榑傪摫偒弌偟傑偟偨丅
偙傟偼丄嬶懱揑偵偼埲壓偺傛偆側傕偺偱偡丅
丒嬫夋偵僙儞僒偑擖偭偨屻丄墶暻偺忬懺傪抦傞偙偲偑偱偒傑偡丅偦偺嬫夋偵乽擖偭偰乿偒偨偺偩偐傜丄屻傠暻偼摉慠側偟丅
丒偝偰娞怱偺慜暻偼丄偁傞偐側偄偐偺擇捠傝丅
丒偙偙偱丄乽慜暻偑偁偭偨乿偲偟偰丄尰嵼偄傞嬫夋偺忣曬傪壖偵嶌傝摍崅慄傪堷偄偰丄堏摦偡傞曽岦傪寛掕偟丄
壖偺曄悢偵偦偺曽岦傪曐懚丅
丒師偵丄乽慜暻偑側偐偭偨乿偲偟偰丄摨偠傛偆偵曽岦傪寛掕偟丄偙傟傕曐懚丅
偙傟偩偗偺寁嶼傪偟偨偁偲丄幵懱偺妏搙傪傑偭偡偖偵捈偟傑偡丅
偦偺屻丄堦掕嫍棧傪恑傫偱丄偦偺嬫夋偵姰慡偵擖偭偨偙偲偵側傝傑偡丅
偮傑傝丄慜偵暻偑偁傞偐偳偆偐偑敾抐偱偒傞応強傑偱恑傫偩傢偗偱偡丅
傕偆屻偼偍暘偐傝偱偡偹丠
暻偑偁偭偨傜丄乽慜暻偑偁偭偨乿帪偵恑傓曽岦傪丄曐懚偟偰偁傞曄悢偐傜偲傝偩偟丄偦偪傜偺曽岦傊恑傒傑偡丅
側偐偭偨傜丄乽慜暻偑側偐偭偨乿帪偵恑傓曽岦傪丄曐懚偟偰偁傞曄悢偺曽偐傜庢傝弌偟偰丄偦傟偵廬偄傑偡丅
偨偩偦傟偩偗偱偡丅
偙偆偄偆廳偨偄張棟傪偟偰偙偺儅僂僗偼恑傫偱偄傞偺偱偡丒丒丒丅
丒丒丒偙傟傪彂偄偰偄傞偆偪偵巚偭偨傫偱偡偑丄僙儞僒偺攝抲偵娭偟偰偼丄柧傜偐側愝寁儈僗偱偡偹丒丒丒丅
傕偭偲慜偵丄埨掕偡傞宍偱偲傝偮偗傜傟傟偽丄偙傫側嬯楯偼偟側偔偰傕椙偐偭偨傫偱偡偑丅
偒偭偲丄俙倁俤亅侾傕偙偺揰偵偼晄枮傪姶偠偰偄傞偱偟傚偆乮丠乯丅
偪側傒偵俛俙俽俬俠俵俷倀俽俤偺傛偆側崱帪偺儅僂僗偩偲丄傾僫儘僌揑偵慜暻傑偱偺嫍棧偑撉傔傞偺偱丄
嬫夋偺恀拞丄壥偰偼嬫夋偵擖傝偐偗偺忬懺偱傕丄慜暻偺忣曬傪庢傞偙偲偑偱偒傑偡丅
偮傑傝丄偙傫側嬯楯傪偡傞昁梫偼側偄偼偢偱偡丅